27. května 2019 08:09
Demystifikace kolaborativních průmyslových robotů
Mezinárodní federace robotiky (IFR, International Federation of Robotics) zveřejnila v prosinci 2018 zprávu nazvanou Demystifikace kolaborativních průmyslových robotů (Demystifying Collaborative Industrial Robots), která se snaží nalézt odpověď na otázku současné a budoucí úlohy kolaborativní robotiky. Níže uvádíme překlad podstatné části zprávy, kterou nám poskytl jeden ze členů IFR – společnost FANUC.
Kolaborativní (spolupracující) průmyslové roboty jsou určeny k pracovním úkonům ve spolupráci s pracovníky v průmyslu. Mezinárodní federace robotiky definuje dva typy kolaborativních robotů. Do první skupiny spadají kolaborativní roboty odpovídající normě ISO 10218-1, která stanoví požadavky a směrnice pro jejich základní bezpečnou konstrukci a ochranná opatření a uvádí informace pro používání průmyslových robotů. Do druhé skupiny patří kolaborativní roboty, které nesplňují požadavky normy ISO 10218-1. To však neznamená, že tyto roboty nejsou bezpečné. Mohou splňovat požadavky jiných bezpečnostních norem, například národních nebo vnitropodnikových.
 Vlastnosti kolaborativních robotů
Vlastnosti kolaborativních robotů
U jednotlivých typů kolaborativních robotů existuje řada rozdílů z hlediska souladu s výše uvedenými normami a rozsahem kontaktů robotů s pracovníky u spolupracujících aplikací. Na jedné straně technického spektra jsou tradiční průmyslové roboty pracující v odděleném prostoru, do něhož mohou pracovníci periodicky vstupovat, aniž by museli roboty vypínat a předběžně zabezpečovat výrobní buňku. To je časově náročný proces, který může stát tisíce dolarů za jednu minutu prostoje. Pracovní prostor robotů lze vybavit senzory, jež snímají pohyby lidí a zajišťují, že robot pracuje velmi pomalu nebo se zastaví, octne‑li se pracovník ve vymezeném prostoru.
Na druhém konci spektra jsou průmyslové roboty určené výslovně k práci společně s lidskou obsluhou, a to ve sdíleném prostoru. Tyto roboty – často označované jako koboty (zkratka slov kolaborativní robot) – mají řadu různých technických charakteristik, které zajišťují, že nemohou způsobit jakoukoli újmu (škodu), když s nimi pracovník přijde do přímého styku, ať již úmyslně, nebo omylem. Tyto charakteristiky zahrnují lehké materiály, zaoblené obrysy, vycpávání „kůže“ (vycpávky se zabudovanými snímači) a snímače u podstavce robota nebo u spojů, které měří a ovládají sílu a rychlost a zajišťují, že nepřesahují určené prahové hodnoty v případě kontaktu.
Zajištění bezpečnosti
Stejně jako jiná průmyslová strojní zařízení musí být bezpečné i kolaborativní roboty. Mezinárodní organizace pro normalizaci (ISO) vypracovala normy pro roboty pracující ve čtyřech typech spolupracujících režimů. Pokud robot splňuje požadavky těchto norem, může být použit v podstatě bezpečně. Avšak bezpečný robot sám o sobě v praxi ještě nezaručuje bezpečnou spolupráci s pracovníkem. Proces, při němž bezpečný kobot drží ostrý nástroj, není bezpečný, ať již kobot pracuje jakkoli pomalu. Koncoví uživatelé proto musejí vypracovat rizikové zhodnocení zamýšlené aplikace, aby si byli jisti, že splňuje právně závazné normy pro zdraví a bezpečnost práce v jejich zemi. Toto zhodnocení se týká celé aplikace a zahrnuje pracovní prostor, robot, koncový efektor, nástroje, zpracovávané díly a jiné prvky, jako například kabeláž a osvětlení, které by mohly být zdrojem rizika.
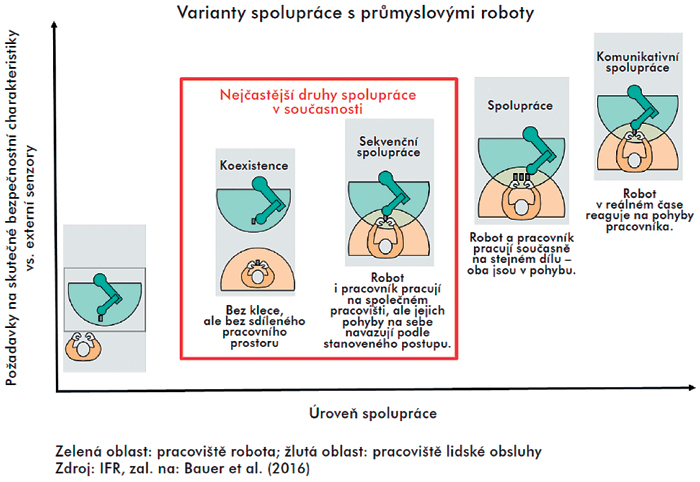
Varianty spolupráce člověk-průmyslový robot
Spolupráce člověk-robot může probíhat v řadě variant, od sdíleného pracoviště bez jakéhokoli přímého styku člověka s robotem nebo synchronizace úkolů až k robotu, který přizpůsobuje svůj pohyb v reálném čase pohybu určitého pracovníka.
Členové IFR mají běžně za to, že nejobvyklejší aplikací pro kolaborativní roboty jsou sdílené aplikace, kde robot a lidská obsluha pracují vedle sebe a postupně vykonávají jednotlivé pracovní operace. Roboty obvykle vykonávají operace, které jsou zdlouhavé a nudné nebo neergonomické, od zvedání těžkých dílů po opakované operace jako utahování šroubů. Případové studie uvádějící reálné aplikace spolupráce člověk–robot s různou intenzitou této spolupráce lze najít na webových stránkách IFR. Aplikace, při nichž v reálném čase robot reaguje na pohyb pracovníka – například změnou úhlu gripperu (uchopovače) tak, aby odpovídal úhlu, pod kterým pracovník podává robotu díl k zpracování, jsou z technického hlediska výzvou. Jelikož robot se potřebuje přizpůsobit pohybu pracovníka, jehož pohyby nelze zcela předvídat, koncový uživatel si musí být jist, že všechny parametry potenciálního rozsahu pohybů robota splňují bezpečnostní požadavky. Příklady komunikativní spolupráce v průmyslovém prostředí se nejspíš ještě brzy neobjeví ve většině výrobních odvětví, která spoléhají na přesnost a opakovatelnost vedoucí ke zvyšování produktivity práce.
Výhody kolaborativních robotů
Kolaborativní roboty jsou ekonomicky rentabilní cestou k automatizaci pomocí robotů. Lze je použít k automatizaci částí výrobní linky s minimálními změnami její zbývající části a opatřit podnikům, které dosud výrobní proces neautomatizovaly (většinou malé a střední podniky) přístup ke zlepšení produktivity práce a jakosti, kterou roboty nabízejí.
U podniků, jakými jsou například výrobci automobilů, kteří již plně automatizovali výrobu karoserií, použití kolaborativních robotů navíc nabízí možnost ulehčit pracovníkům práci při konečné montáži auta, která je často zdrojem chronických poškození páteře. Kolaborativní roboty umožňují výrobcům automatizovat ty části výrobního procesu, které jsou pro lidi zdlouhavé a nudné – od nošení dílů a zakládání do strojů až k ověřování jakosti, což je činnost, kterou člověk jen velmi těžko provádí pečlivě po delší dobu.
V minulosti bylo od systémových integrátorů a expertů v oblasti robotiky požadováno, aby instalovali, programovali a provozovali roboty. Programová rozhraní jsou nyní intuitivnější, a to jak u tradičních robotů, tak u novějších kobotů. Odborníci na systémovou integraci jsou stále žádáni u složitých aplikací a u těch, která vyžadují přestavbu celého výrobního procesu. Avšak u jednodušších, nezávislých aplikací může i pracovník s minimálními zkušenostmi s robotikou snadno přesunout robot na jinou práci. To je zvlášť důležité pro výrobce s malými výrobními sériemi, kteří musí umět rychle přesunout robot k provádění úkonů na další sérii. Koboty jsou obvykle lehké konstrukce a lze je snadno přemísťovat po celém podniku. Obvykle zabírají méně podlahové plochy, což je pro výrobce významná nákladová položka. Tato kombinace charakteristik oslovuje trh koncových uživatelů, kteří jsou v automatizaci pomocí robotů nováčky a nemají nebo neplánují získat schopnost být experty v automatizaci.
Průmyslové roboty obvykle pracují na pevném místě, existuje však i poptávka po mobilních průmyslových robotech, které kombinují mobilní bázi s (kolaborativním) robotem. Takový robot může například přenášet materiál z jednoho pracovitě a někde ho vyložit, nebo ho na jiném pracovišti upnout do stroje.
Výběr správného robota, ať už tradičního nebo kolaborativního, se řídí tím, k jakému účelu je určen. Pokud primárními automatizačními kritérii jsou rychlost a absolutní přesnost, nebude žádná forma aplikace s kolaborativním robotem ekonomicky rentabilní. V takovém případě bude, a to i v budoucnosti, dávána přednost tradičnímu, průmyslovému robotu umístěnému v kleci. Pokud díl, se kterým robot manipuluje, může být v pohybu nebezpečný, například má‑li ostré hrany, je určité ohrazení robota nutné. To platí i pro koboty, které se po dotyku zastavují. Jiným faktorem, který ovlivňuje ekonomickou rentabilitu, je míra, do jaké musí být robot začleněn do soustavy jiných strojů v daném výrobním procesu. Čím větší je toto začlenění, tím větší jsou náklady spojené s jeho instalací.
Kolaborativní průmyslové roboty jsou nástrojem, který podporuje zaměstnance v jejich práci, přičemž je zbavuje řady těžkých, neergonomických, zdlouhavých a únavných úkonů, jako například držet těžkou součást nehnutě v požadované poloze, aby do ní jiný pracovník mohl zašroubovat šrouby. Avšak stále existuje mnoho úkonů, které jsou pro člověka snadné, ale těžko se automatizují, například práce s nevytříděnými díly a nepravidelné nebo pružně zvlněné tvary. Dokončovací operace jako leštění a broušení, které vyžadují stálou kontrolu správného přítlaku na díl, se rovněž nedají dost dobře rentabilně automatizovat. Kolaborativní robotika zde výrobcům umožňuje zvyšovat produktivitu práce použitím robotů jako doplňku lidské zručnosti.
Trend vývoje kolaborativní robotiky
Trh s kolaborativními roboty je stále ještě v plenkách. Koncoví uživatelé a systémoví integrátoři stále získávají zkušenosti o tom, co funguje a nefunguje v oblasti konstrukce a zavádění kolaborativních aplikací. Technický rozvoj snímačů a gripperů (uchopovačů) slibuje rozšíření rozsahu činností, které může koncový efektor vykonávat. Programová rozhraní budou ještě intuitivnější nejen u kobotů, ale i u tradičních průmyslových robotů.
Předpovědi růstu trhu s kolaborativními roboty se značně liší a některé prognózy ani nedělají rozdíl mezi sektorem výroby a odborným servisem. IPR si proto dává za cíl vypracovat spolehlivé statistiky a předpovědi o trhu s kolaborativními průmyslovými roboty, založené na obchodních údajích od dodavatelů robotů. Předběžné výsledky ukazují, navzdory medializaci, že méně než 4 % z 381 000 průmyslových robotů instalovaných ve světě v roce 2017 byly koboty.
www.fanuc.cz, zdroj: IFR
Mohlo by se Vám líbit

Blackout může trvat jen několik sekund, ale odstávka výroby celé hodiny. A stát miliony
- Elektro
-
26. července 2026
Výpadek elektřiny ve výrobním podniku není pouhá technická nepříjemnost. I několikasekundové přerušení dodávky může zastavit celou výrobní linku, vyřadit řídicí systémy, znehodnotit rozpracovanou výrobu a způsobit […]

Profika: bezpečnostní požadavky ve výrobě se zpřísňují, pracovních úrazů v oboru ubývá
- Práce
-
24. července 2026
Zpracovatelský průmysl, do kterého spadá i strojírenství, patří z hlediska počtu pracovních úrazů mezi nejrizikovější obory. V roce 2025 zde bylo zaznamenáno 14 558 úrazů […]

Představujeme Gabby – AI Asistenta Tungaloy pro Výběr Nástrojů
- Digitalizace
-
22. července 2026
Společnost Tungaloy Corporation představuje Gabby, asistenta využívajícího umělou inteligenci, který pomáhá odborníkům v oblasti obrábění kovů rychle identifikovat vhodná nástrojová řešení prostřednictvím komunikace v přirozeném […]